







[Research]
I am a Research Associate in Applied Mathematics and Computer Science at the University of Bristol. My research area is unsupervised learning with self-organised neural networks. Previously, I was a Post-doctoral Research Fellow at the University of Southampton and worked at the Bristol Robotics Laboratory in the area of swarm robotics. My wider research interests include the emergence of intelligence in embodied systems and human-robot interaction.
 This project looks at the challenges involved in modeling, understanding and designing of...
This project looks at the challenges involved in modeling, understanding and designing of...
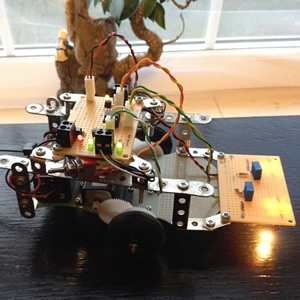 Linee is a line following robot that instead of being programmed, uses a fully analogue controller...
Linee is a line following robot that instead of being programmed, uses a fully analogue controller...
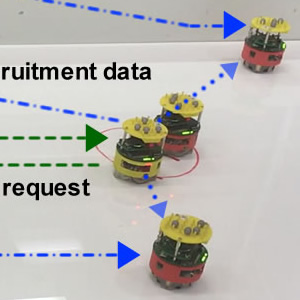 Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
 Attributes of ultrastability as an adaption mechanism in a hormone-modulated neural robot...
Attributes of ultrastability as an adaption mechanism in a hormone-modulated neural robot...
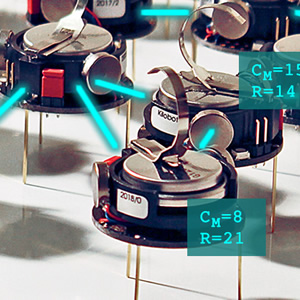 The Information-Cost-Reward (ICR) framework relates the way in which robots obtain and share...
The Information-Cost-Reward (ICR) framework relates the way in which robots obtain and share...
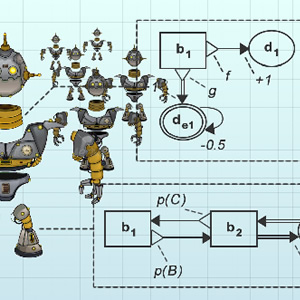
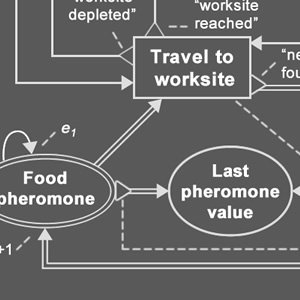 Behaviour-Data Relations Modeling Language (BDRML) explicitely represents behaviours and data that...
Behaviour-Data Relations Modeling Language (BDRML) explicitely represents behaviours and data that...
Selected research projects
Designing Robot Swarms
This project looks at the challenges involved in modeling, understanding and designing of...
Linee the line follower
Linee is a line following robot that instead of being programmed, uses a fully analogue controller...
Robustness in Foraging E-puck Swarms Through Recruitment
Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
Ultrastable Neuroendocrine Robot Controller
Attributes of ultrastability as an adaption mechanism in a hormone-modulated neural robot...
The Information-Cost-Reward framework for understanding robot swarm foraging
The Information-Cost-Reward (ICR) framework relates the way in which robots obtain and share...
Behaviour-Data Relations Modelling Language For Multi-Robot Control Algorithms
Behaviour-Data Relations Modeling Language (BDRML) explicitely represents behaviours and data that...


