







[Development]
I've been writing code since the age of 14. Throughout my BSc, MSc and PhD studies, I supported myself by being a self-employed software and web developer, as well as by working for a number of companies. I was a part of teams two to ten people large, and have worked both in a standard office environment and within remote teams distributed across the world. I also have experience of being a sole developer and taking responsibility across all stages of a project.
My roles included being a developer in around ten different programming languages (from HTML to C++), a systems architect, a project manager, a R&D project supervisor and a graphic designer. I also worked on a number of games in my free time, which helped me to understand the importance of product design and sensible marketing. I also use coding extensively in my research, especially C++ for writing simulation and robot code, and Python for data analysis.
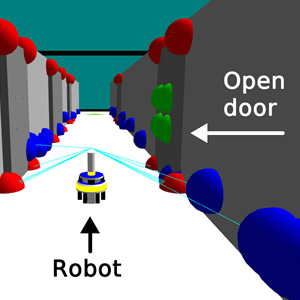 The Grow-When-Required Neural Network implementation in simulated robot experiments using the ARGoS...
The Grow-When-Required Neural Network implementation in simulated robot experiments using the ARGoS...
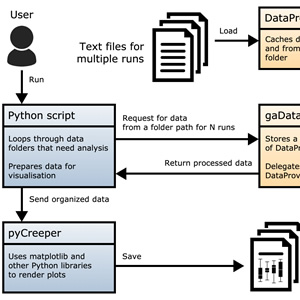 C++ code that processes data and makes it available to Python, significantly improving the...
C++ code that processes data and makes it available to Python, significantly improving the...
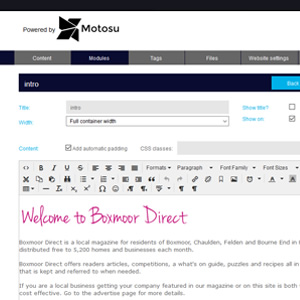 Motosu is a Content Management and a Web Hosting System that takes on Word Press by giving users...
Motosu is a Content Management and a Web Hosting System that takes on Word Press by giving users...
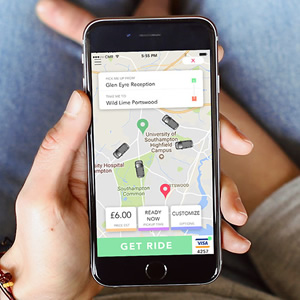 CabMyRide is a taxi company that takes on Uber through offering intuitive mobile phone application...
CabMyRide is a taxi company that takes on Uber through offering intuitive mobile phone application...
 The main purpose of pyCreeper is to wrap tens of lines of python code, required to produce graphs...
The main purpose of pyCreeper is to wrap tens of lines of python code, required to produce graphs...
 Creeper is a Java MVC framework for those who want to create multi-agent simulations (or games) and...
Creeper is a Java MVC framework for those who want to create multi-agent simulations (or games) and...
 The Hive Mind is a sci-fi puzzle game about insect-inspired construction with robots. The player...
The Hive Mind is a sci-fi puzzle game about insect-inspired construction with robots. The player...
 Stardust Colonies is a strategy game in which player-controlled units are aware of and affected by...
Stardust Colonies is a strategy game in which player-controlled units are aware of and affected by...
 The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned...
The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned...
 A custom-built lego machine for playing pong, featuring two controllers connected to the Mindstorms...
A custom-built lego machine for playing pong, featuring two controllers connected to the Mindstorms...
My roles included being a developer in around ten different programming languages (from HTML to C++), a systems architect, a project manager, a R&D project supervisor and a graphic designer. I also worked on a number of games in my free time, which helped me to understand the importance of product design and sensible marketing. I also use coding extensively in my research, especially C++ for writing simulation and robot code, and Python for data analysis.
Selected work-related projects
Novelty detection with robots using the Grow-When-Required Neural Network
The Grow-When-Required Neural Network implementation in simulated robot experiments using the ARGoS...
Fast Data Analysis Using C++ and Python
C++ code that processes data and makes it available to Python, significantly improving the...
Motosu: The Content Management System
Motosu is a Content Management and a Web Hosting System that takes on Word Press by giving users...
Cab My Ride Taxi Service
CabMyRide is a taxi company that takes on Uber through offering intuitive mobile phone application...
pyCreeper
The main purpose of pyCreeper is to wrap tens of lines of python code, required to produce graphs...
Creeper
Creeper is a Java MVC framework for those who want to create multi-agent simulations (or games) and...
Selected spare-time projects
The Hive Mind
The Hive Mind is a sci-fi puzzle game about insect-inspired construction with robots. The player...
Stardust Colonies
Stardust Colonies is a strategy game in which player-controlled units are aware of and affected by...
NXC UserInteraction Library
The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned...
NXTPong
A custom-built lego machine for playing pong, featuring two controllers connected to the Mindstorms...


