pyCreeper
The main purpose of pyCreeper is to wrap tens of lines of python code, required to produce graphs that look good for a publication, into functions. It takes away your need to understand various quirks of matplotlib and gives you back ready-to-use and well-documented code.
Novelty detection with robots using the Grow-When-Required Neural Network
The Grow-When-Required Neural Network implementation in simulated robot experiments using the ARGoS robot simulator.
Fast Data Analysis Using C++ and Python
C++ code that processes data and makes it available to Python, significantly improving the execution speed.
Designing Robot Swarms
This project looks at the challenges involved in modeling, understanding and designing of multi-robot systems.
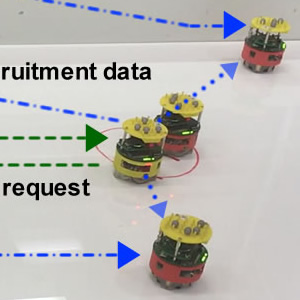
Robustness in Foraging E-puck Swarms Through Recruitment
Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON positioning system. Recruitment can make swarms more robust to noise in robot global positioning data.








 Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
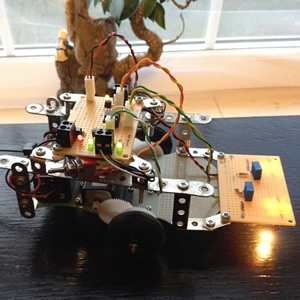 Linee is a line following robot that instead of being programmed, uses a fully analogue controller...
Linee is a line following robot that instead of being programmed, uses a fully analogue controller...
 Il Matto is a microcontroller development board that uses Atmel's ATMega644PA AVR chip. It was...
Il Matto is a microcontroller development board that uses Atmel's ATMega644PA AVR chip. It was...
 A custom-built lego machine for playing pong, featuring two controllers connected to the Mindstorms...
A custom-built lego machine for playing pong, featuring two controllers connected to the Mindstorms...
 The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned...
The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned...
 Robogator is a robot alligator that can walk and bite. Two rear legs powered by motors push the...
Robogator is a robot alligator that can walk and bite. Two rear legs powered by motors push the...
 ShooterBot spins around, looking for close targets to shoot at. Its proximity sensor starts firing...
ShooterBot spins around, looking for close targets to shoot at. Its proximity sensor starts firing...


