







[Controlling Ant-Based Construction]
Date: Apr 2013

 Technologies used: Java, JFreeChart, Model-View-Controller, Git
Technologies used: Java, JFreeChart, Model-View-Controller, Git
Publication:
Pitonakova, L. & Bullock, S. (2013). Controlling Ant-Based Construction. In Lio, P. et al. (eds.), Proceedings of the Twelfth European Conference on the Synthesis and Simulation of Living Systems (ECAL 2013), MIT Press, 151-158.
Stigmergy allows insect colonies to collectively build structures that no single individual is fully aware of. Since relatively minimal sensory and reasoning capabilities are required of the agents, such building activity could be utilised by robotic swarms if we could learn how to control the shape of the final structures.

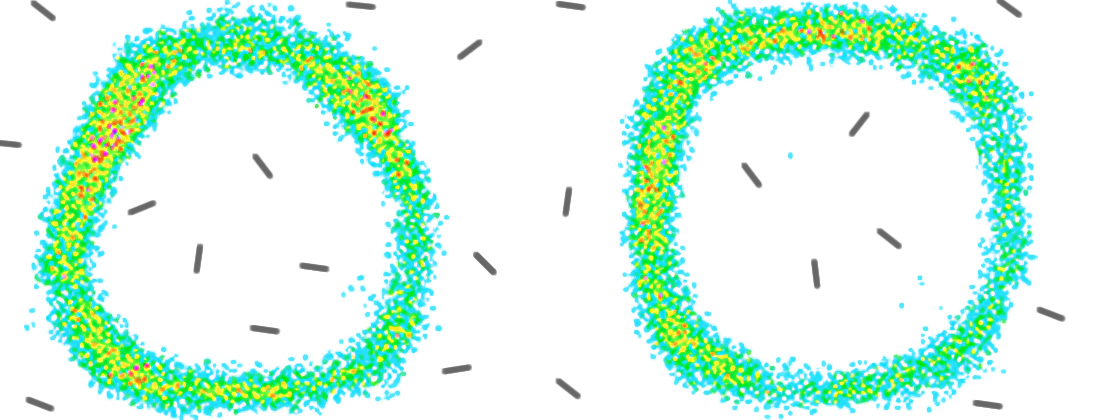
The paper investigates dynamics of ant nest building and shows that algorithms capable of generating ant-like structures can also be used to create nests, shapes of which are imposed from outside of the system.

Publication:
Pitonakova, L. & Bullock, S. (2013). Controlling Ant-Based Construction. In Lio, P. et al. (eds.), Proceedings of the Twelfth European Conference on the Synthesis and Simulation of Living Systems (ECAL 2013), MIT Press, 151-158.
Stigmergy allows insect colonies to collectively build structures that no single individual is fully aware of. Since relatively minimal sensory and reasoning capabilities are required of the agents, such building activity could be utilised by robotic swarms if we could learn how to control the shape of the final structures.
The paper investigates dynamics of ant nest building and shows that algorithms capable of generating ant-like structures can also be used to create nests, shapes of which are imposed from outside of the system.



{Please enable JavaScript in order to post comments}