







[Neural Networks and Evolution of Cooperation]
Date: Jan 2011

 Technologies used: Java, JFreeChart, Ant Script, Model-View-Controller, Git
Technologies used: Java, JFreeChart, Ant Script, Model-View-Controller, Git
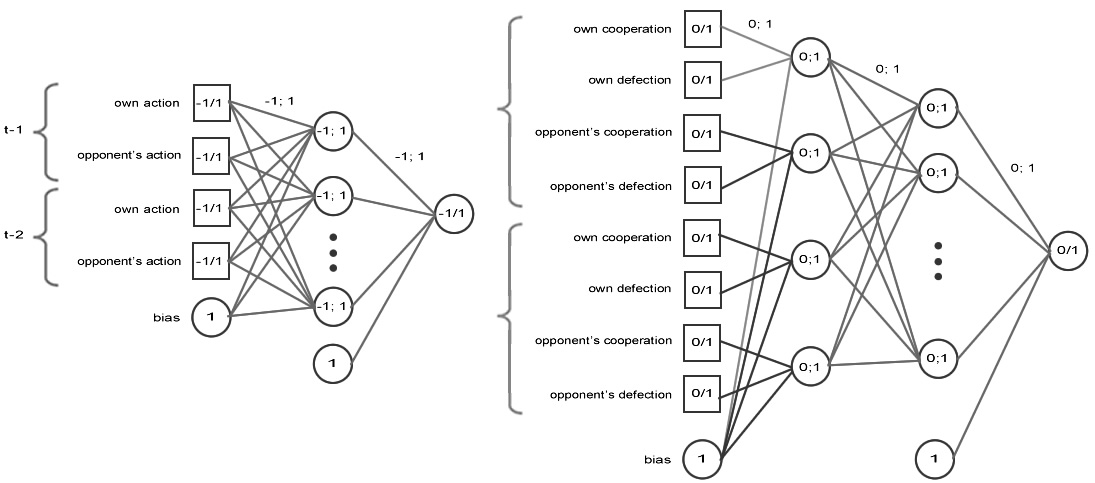
The paper investigates artificial evolution of cooperation in the Iterated Prisoner's Dilemma using a number of player implementations. Existing strategy encoding and neural network models are compared with action-discriminating neural network, described here for the first time.
Evaluation is performed in terms of number of generations needed for reaching a desired cooperation level. The nature of the evolved strategies is also evaluated. Examples when the action-discriminating model evolved the most beneficent strategies are given.
The paper investigates artificial evolution of cooperation in the Iterated Prisoner's Dilemma using a number of player implementations. Existing strategy encoding and neural network models are compared with action-discriminating neural network, described here for the first time.
Evaluation is performed in terms of number of generations needed for reaching a desired cooperation level. The nature of the evolved strategies is also evaluated. Examples when the action-discriminating model evolved the most beneficent strategies are given.



{Please enable JavaScript in order to post comments}