







[Linee the line follower]
Date: Dec 2013
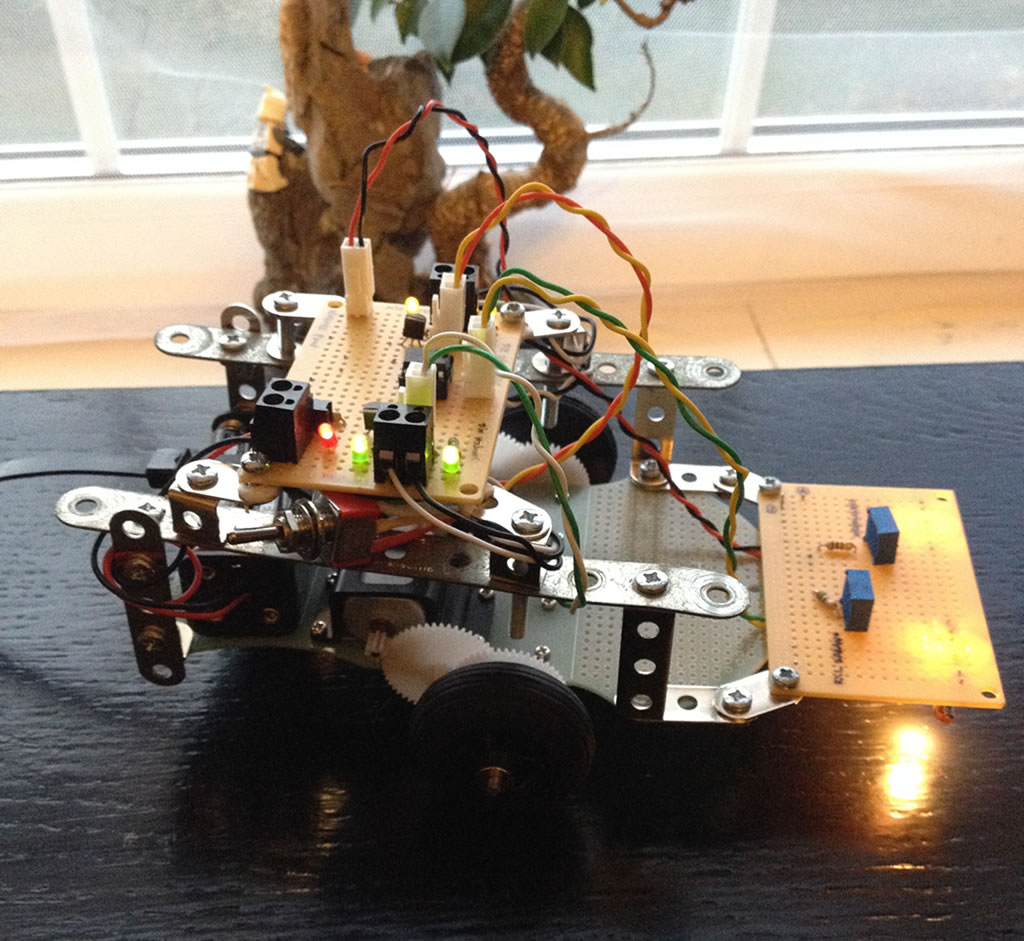 Linee is a line following robot that instead of being programmed, uses a fully analogue controller board. It features headlights, light sensors, a comparator chip, wheels and other small parts that make it follow either black lines on a light background or white lines on a dark background. This is my first real robotic project ever.
Linee is a line following robot that instead of being programmed, uses a fully analogue controller board. It features headlights, light sensors, a comparator chip, wheels and other small parts that make it follow either black lines on a light background or white lines on a dark background. This is my first real robotic project ever.
How does it work? The resistance of the light sensors (photo resistors) mounted in the front, facing the floor, is different on the two sides when the robot is crossing a line (i.e. when a different light reflection due to a different colour is being perceived). At that point, the comparator chip finds the difference and sends a higher voltage to the proper wheel, making it turn faster, so that the robot turns slightly until the colour perceived by the sensors is the same again. The green or yellow indicator LEDs light up as well to signalise which side is getting power. This way of processing information makes the robot ‘wiggle’ as it follows a line.
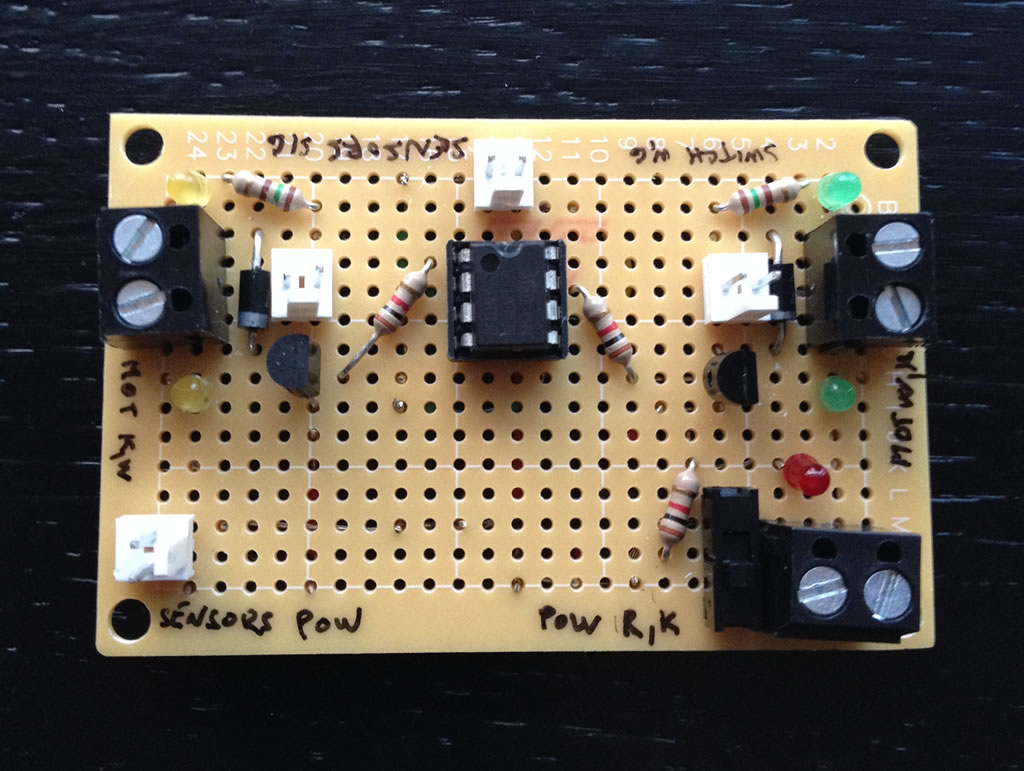
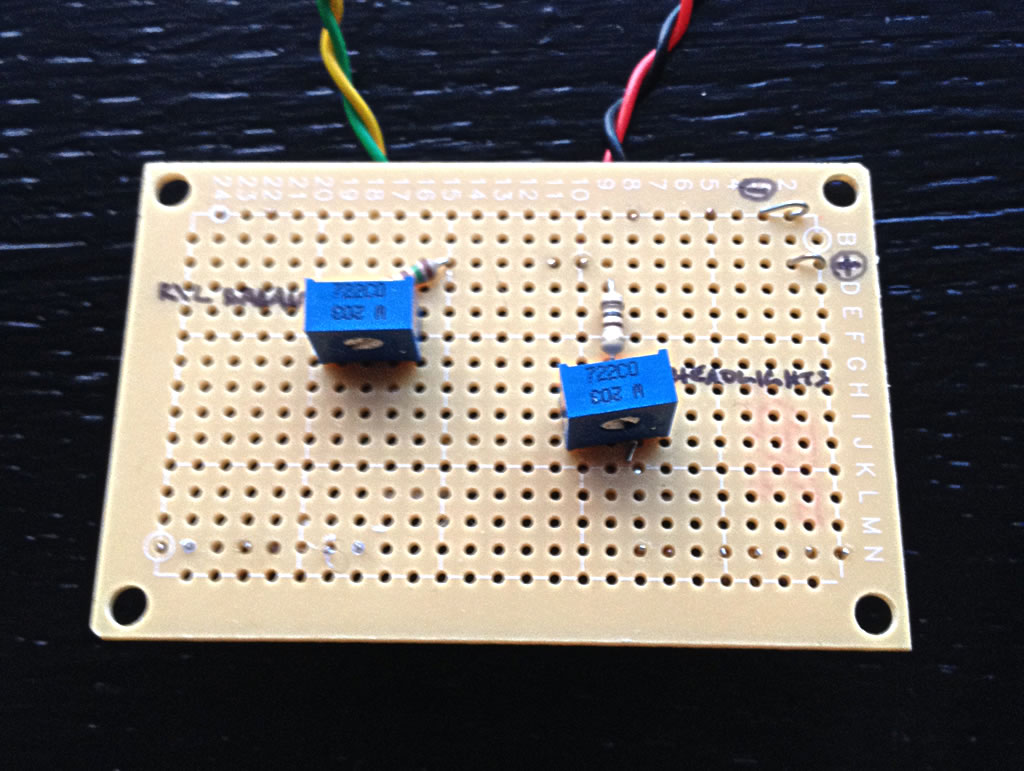
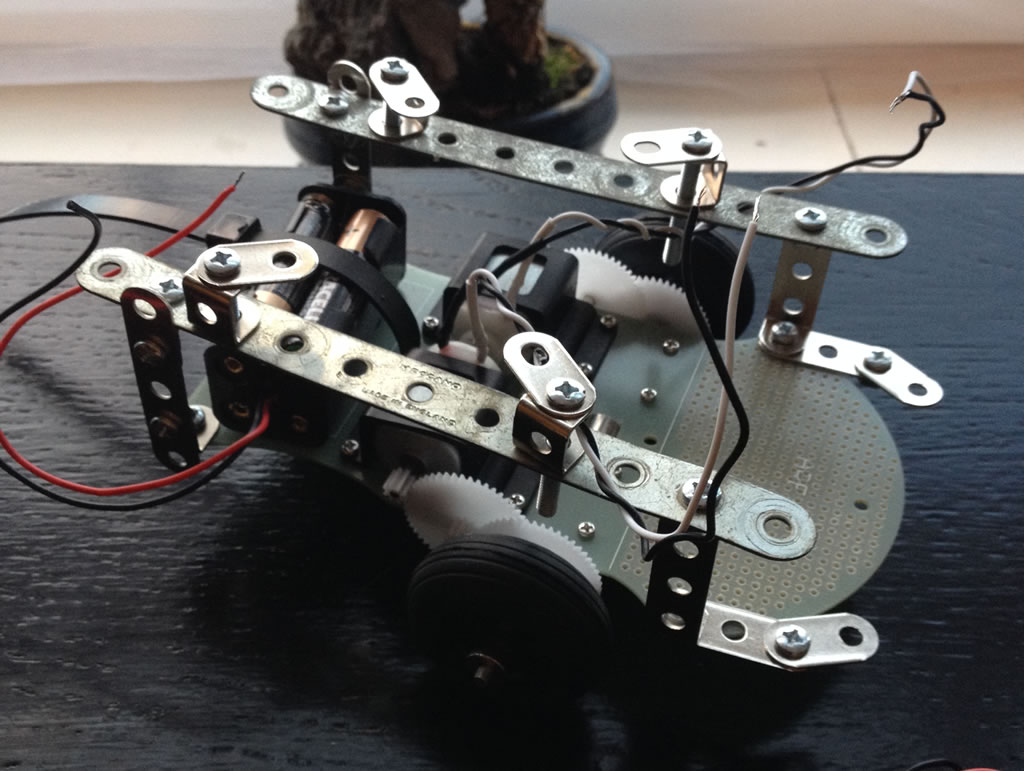
The robot consists of two soldered breadboards. The sensory breadboard is in the front and contains variable resistors that can adjust the strength of the headlights and the balance between the right and left side of the light sensors. The control board sits on top of the robot and connects the sensory board with all the other necessary electronics, wheels and the power supply. The boards are mounted on a basic mobile chassis with custom-built body made of Meccano parts. There is also a switch that changes the behaviour between black-line-following and white-line-following.
Linee is a line following robot that instead of being programmed, uses a fully analogue controller board. It features headlights, light sensors, a comparator chip, wheels and other small parts that make it follow either black lines on a light background or white lines on a dark background. This is my first real robotic project ever.How does it work? The resistance of the light sensors (photo resistors) mounted in the front, facing the floor, is different on the two sides when the robot is crossing a line (i.e. when a different light reflection due to a different colour is being perceived). At that point, the comparator chip finds the difference and sends a higher voltage to the proper wheel, making it turn faster, so that the robot turns slightly until the colour perceived by the sensors is the same again. The green or yellow indicator LEDs light up as well to signalise which side is getting power. This way of processing information makes the robot ‘wiggle’ as it follows a line.
The robot consists of two soldered breadboards. The sensory breadboard is in the front and contains variable resistors that can adjust the strength of the headlights and the balance between the right and left side of the light sensors. The control board sits on top of the robot and connects the sensory board with all the other necessary electronics, wheels and the power supply. The boards are mounted on a basic mobile chassis with custom-built body made of Meccano parts. There is also a switch that changes the behaviour between black-line-following and white-line-following.
| Control board top | Sensory board top |
 |
 |
 |
 |
 |
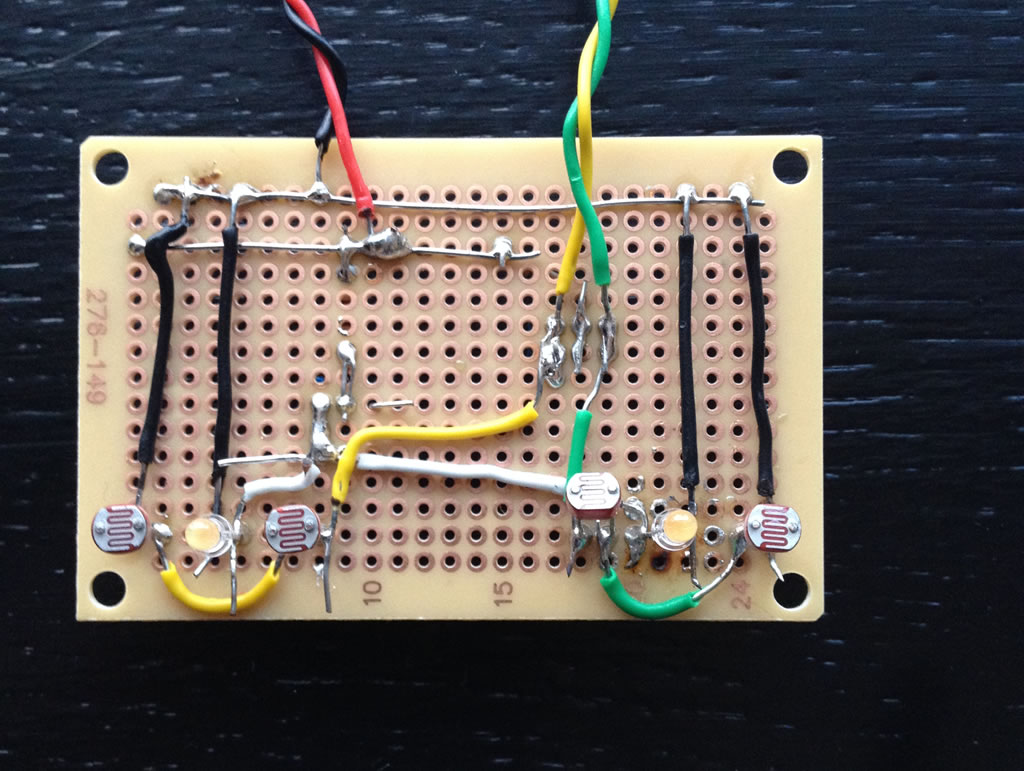
| Control board bottom | Sensory board bottom | Empty chassis |



{Please enable JavaScript in order to post comments}