







[Boid Game-Playing through Randomised Movement]
Date: Oct 2012
 Technologies used: Java, JFreeChart, Model-View-Controller, Git
Technologies used: Java, JFreeChart, Model-View-Controller, Git
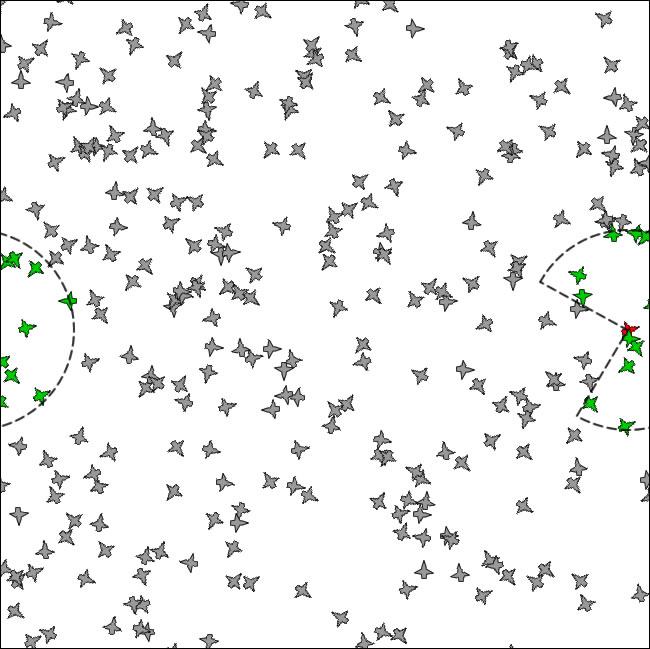
The original boid flocking algorithm is extended by adding randomised movement to the flock members.
This approach is a light-weight alternative to other ‘follow the leader’ techniques implemented in order to create a ‘game-playing’ behaviour during which a flock changes its movement direction as observed in real birds.

Technologies used: Java, JFreeChart, Model-View-Controller, GitThe original boid flocking algorithm is extended by adding randomised movement to the flock members.
This approach is a light-weight alternative to other ‘follow the leader’ techniques implemented in order to create a ‘game-playing’ behaviour during which a flock changes its movement direction as observed in real birds.



{Please enable JavaScript in order to post comments}