







[Does Communication Make a Difference?]
Project: Designing Robot Swarms
Date: Apr 2010
 This paper compares different animal groups from eusocial insect colonies to human society and discusses their mechanics and behaviour as agent systems.
This paper compares different animal groups from eusocial insect colonies to human society and discusses their mechanics and behaviour as agent systems.
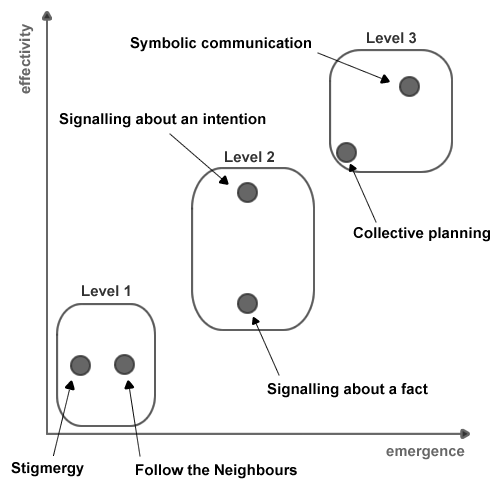
The main focus is on interaction between the agents and on how properties of a system like effectiveness or predictability are affected by these interactions.

Date: Apr 2010
This paper compares different animal groups from eusocial insect colonies to human society and discusses their mechanics and behaviour as agent systems.The main focus is on interaction between the agents and on how properties of a system like effectiveness or predictability are affected by these interactions.



{Please enable JavaScript in order to post comments}