







[Ultrastable Neuroendocrine Robot Controller]
Date: Aug 2011

 Technologies used: Java, JFreeChart, Model-View-Controller, Git
Technologies used: Java, JFreeChart, Model-View-Controller, Git
Publication:
Pitonakova, L. (2013). Ultrastable neuroendocrine robot controller. Adaptive Behaviour, 21(1), 47-63.
Attributes of ultrastability as an adaption mechanism in a hormone-modulated neural robot controller were investigated in a simulation. Action-selection based on hormone-driven utilities of memory items was used to alternate between resource gathering and recharging tasks.
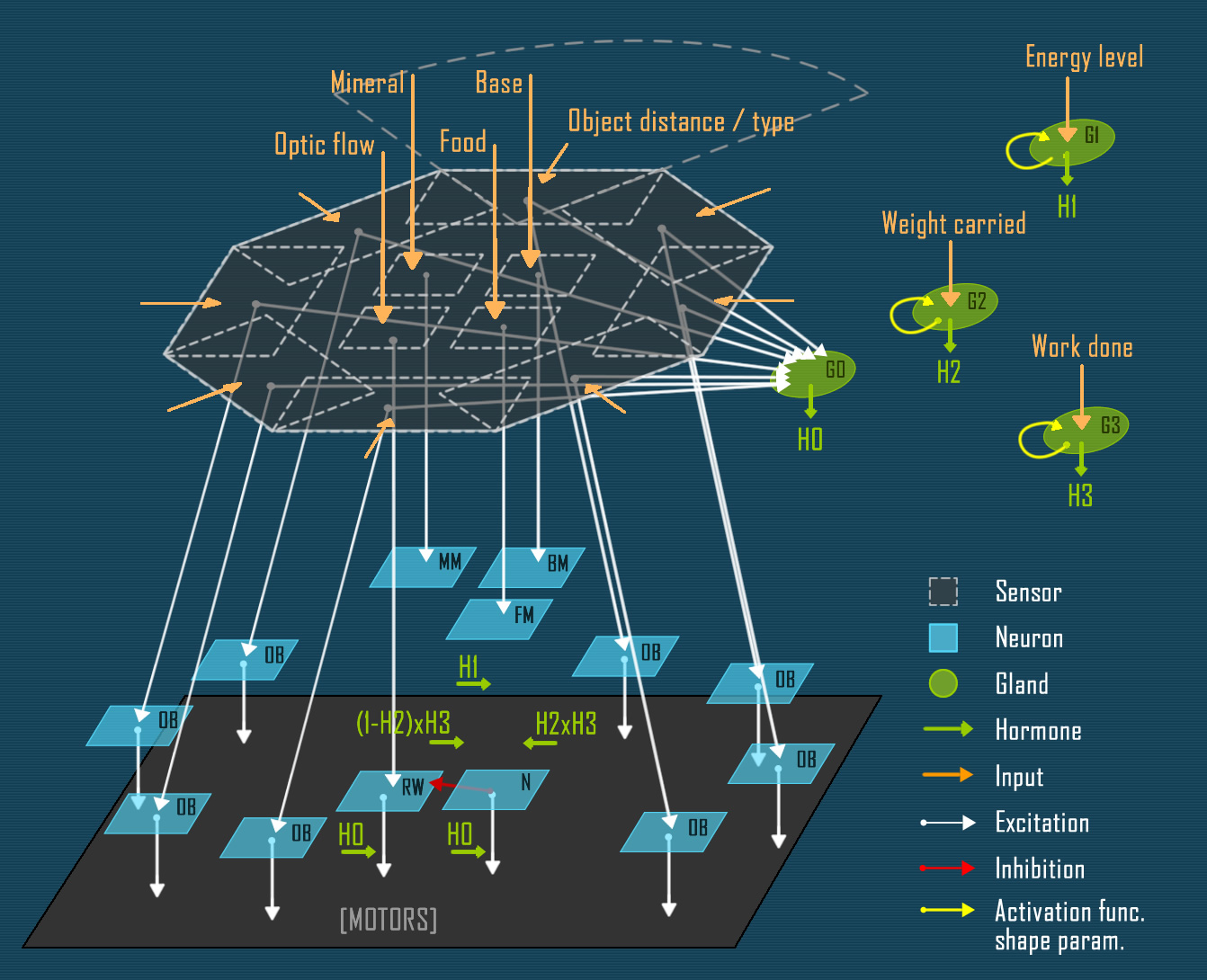
The implemented ultrastability mechanism was applied on two different time scales, to regulate fast-operating neurons and slowly-operating glands. The main limitation of the algorithm was that the adaptation was unstable when a task required an unexpectedly varied satisfaction time.
Publication:
Pitonakova, L. (2013). Ultrastable neuroendocrine robot controller. Adaptive Behaviour, 21(1), 47-63.
The implemented ultrastability mechanism was applied on two different time scales, to regulate fast-operating neurons and slowly-operating glands. The main limitation of the algorithm was that the adaptation was unstable when a task required an unexpectedly varied satisfaction time.



{Please enable JavaScript in order to post comments}