







[Multi-agent systems]
Designing Robot Swarms
 This project looks at the challenges involved in modeling, understanding and designing of...
This project looks at the challenges involved in modeling, understanding and designing of...
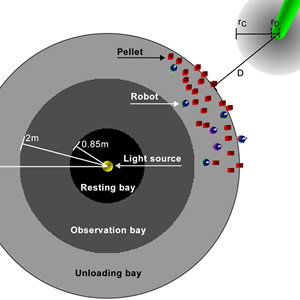
Robustness in Foraging E-puck Swarms Through Recruitment
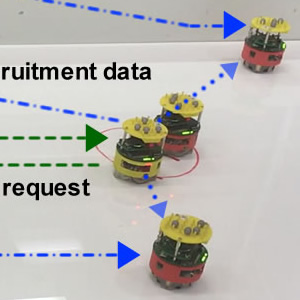 Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON...
Information Flow Regulation in Preferentially Foraging Swarms
 Swarms are tasked with foraging from multiple sources in dynamic environments where source...
Swarms are tasked with foraging from multiple sources in dynamic environments where source...
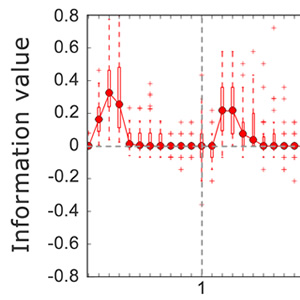
The Information-Cost-Reward framework for understanding robot swarm foraging
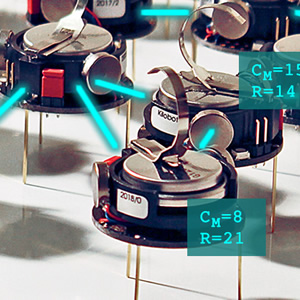 The Information-Cost-Reward (ICR) framework relates the way in which robots obtain and share...
The Information-Cost-Reward (ICR) framework relates the way in which robots obtain and share...
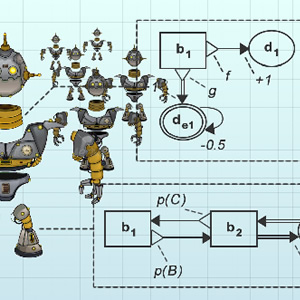
Behaviour-Data Relations Modelling Language For Multi-Robot Control Algorithms
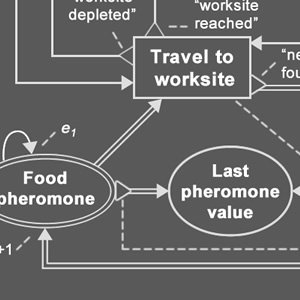 Behaviour-Data Relations Modeling Language (BDRML) explicitely represents behaviours and data that...
Behaviour-Data Relations Modeling Language (BDRML) explicitely represents behaviours and data that...
Task Allocation in Foraging Robot Swarms
 Bee-inspired self-regulation algorithms for robot swarms that deliver items into a single drop-off...
Bee-inspired self-regulation algorithms for robot swarms that deliver items into a single drop-off...
Information Flow Principles for Plasticity in Robot Swarms
 An important characteristic of a robot swarm that must operate in the real world is the ability to...
An important characteristic of a robot swarm that must operate in the real world is the ability to...
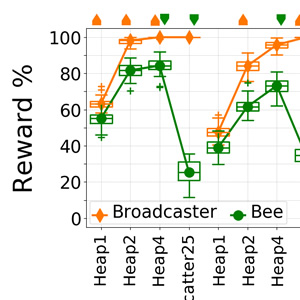
Understanding the Role of Recruitment in Robot Foraging
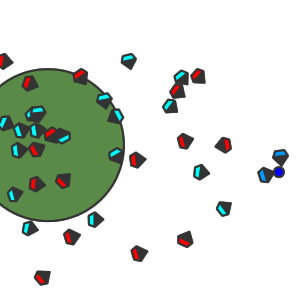 The ability of a simulated robotic swarm of individualists and a swarm of bee-like communicators to...
The ability of a simulated robotic swarm of individualists and a swarm of bee-like communicators to...
Controlling Ant-Based Construction
 Stigmergy allows insect colonies to collectively build structures that no single individual is...
Stigmergy allows insect colonies to collectively build structures that no single individual is...
Boid Game-Playing through Randomised Movement
 The original boid flocking algorithm is extended by adding randomised movement to the flock...
The original boid flocking algorithm is extended by adding randomised movement to the flock...


