







[Information Flow Regulation in Preferentially Foraging Swarms]
Project: Designing Robot Swarms
Date: Jul 2018


 Publication:
Publication:
Pitonakova, L., Crowder, R. & Bullock, S. (2018) The importance of information flow regulation in preferentially foraging robot swarms. Proceedings of the Eleventh International Conference on Swarm Intelligence (ANTS 2018), Springer, 277-289.
Instead of committing to the first source of reward that it discovers, an agent engaged in "preferential foraging" continues to choose between different reward sources in order to maximise its foraging efficiency. In this paper, we study the effect of preferential source selection on the performance of robot swarms with different recruitment strategies:
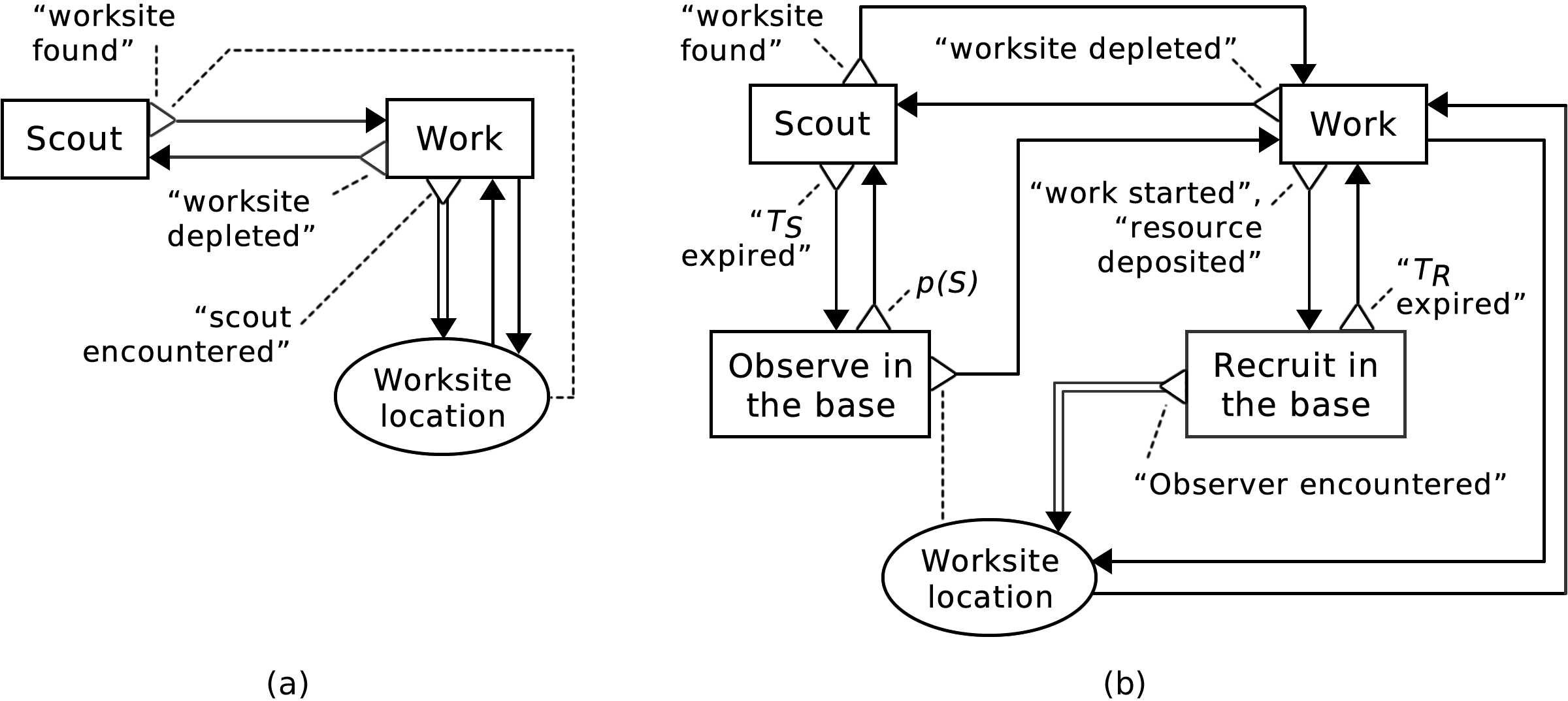 Figure 1: BDRML representations of the (a) Broadcaster and (b) Bee robot controllers.
Figure 1: BDRML representations of the (a) Broadcaster and (b) Bee robot controllers.
The swarms are tasked with foraging from multiple worksites in dynamic environments where worksite locations change periodically and thus need to be re-discovered. There are two types of task:
Outcome:
Analysis indicates that preferential foraging leads to a more even exploitation of resources and a more efficient exploration of the environment provided that information flow among robots, that results from recruitment, is regulated. On the other hand, preferential selection acts as a strong positive feedback mechanism for favouring the most popular reward source when robots exchange information rapidly in a small designated area, preventing the swarm from foraging efficiently and from responding to changes.
 Figure 2: The amount of reward collected by 50-robot Preferential swarms in various tasks and environments. The number of worksites is appended to each environment name. D means the distance of worksites from the base. The up and down arrows above the data points for each environment indicate statistically significant (ANOVA, p=0.01) increase and decrease in performance of the Broadcaster (orange) and Bee (green) Preferential swarms, when compared to the corresponding non-preferential swarms in the same environment.
Figure 2: The amount of reward collected by 50-robot Preferential swarms in various tasks and environments. The number of worksites is appended to each environment name. D means the distance of worksites from the base. The up and down arrows above the data points for each environment indicate statistically significant (ANOVA, p=0.01) increase and decrease in performance of the Broadcaster (orange) and Bee (green) Preferential swarms, when compared to the corresponding non-preferential swarms in the same environment.

Date: Jul 2018

Pitonakova, L., Crowder, R. & Bullock, S. (2018) The importance of information flow regulation in preferentially foraging robot swarms. Proceedings of the Eleventh International Conference on Swarm Intelligence (ANTS 2018), Springer, 277-289.
Instead of committing to the first source of reward that it discovers, an agent engaged in "preferential foraging" continues to choose between different reward sources in order to maximise its foraging efficiency. In this paper, we study the effect of preferential source selection on the performance of robot swarms with different recruitment strategies:
Figure 1: BDRML representations of the (a) Broadcaster and (b) Bee robot controllers.
- Broadcaster (Figure 1a): Robots located near worksites also broadcast the worksite locations to other robots nearby in order to recruit them.
- Bee (Figure 1b): Robots recruit each other in a centrally located base.
The swarms are tasked with foraging from multiple worksites in dynamic environments where worksite locations change periodically and thus need to be re-discovered. There are two types of task:
- Consumption: Worksites represent ``jobs'' that could be completed at the worksite locations.
- Collection: Worksites represent resource deposits. A robot collects one unit of resource at a time, after which the resource had to be deposited in the base.
Outcome:
Analysis indicates that preferential foraging leads to a more even exploitation of resources and a more efficient exploration of the environment provided that information flow among robots, that results from recruitment, is regulated. On the other hand, preferential selection acts as a strong positive feedback mechanism for favouring the most popular reward source when robots exchange information rapidly in a small designated area, preventing the swarm from foraging efficiently and from responding to changes.
Figure 2: The amount of reward collected by 50-robot Preferential swarms in various tasks and environments. The number of worksites is appended to each environment name. D means the distance of worksites from the base. The up and down arrows above the data points for each environment indicate statistically significant (ANOVA, p=0.01) increase and decrease in performance of the Broadcaster (orange) and Bee (green) Preferential swarms, when compared to the corresponding non-preferential swarms in the same environment.


{Please enable JavaScript in order to post comments}