







[Setting up NXC Development on a Mac]
Date: Jan 2012
This tutorial provides a step-by-step guide for setting up your Mac or Linux machine and your NXT Mindstorms brick for development with NXC. We will use the enhanced NXC firmware in order to enable extended functions for development.
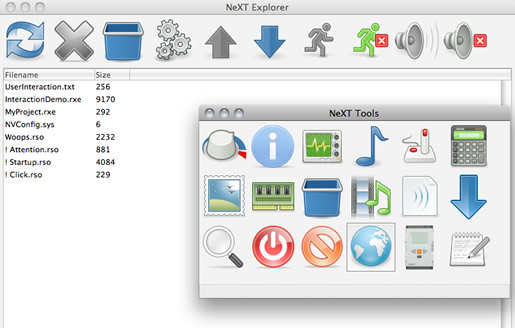
Reinstalling the firmware will erase all your files on the brick so it is a good idea to use the NeXT Explorer and upload all the files to your computer first.
When you are ready, press the Download firmware button and find your firmware file. NXT will restart after the firmware download is finished.
 There will be no sounds that you are normally used to but don't panic! Just use the NeXT Explorer and download the backed-up sounds like Startup.rso and Click.rso back into the brick.
There will be no sounds that you are normally used to but don't panic! Just use the NeXT Explorer and download the backed-up sounds like Startup.rso and Click.rso back into the brick.
You can always revert to the original firmware by getting it from the official Lego support page.
You are now ready to write and compile your first program!
This tutorial provides a step-by-step guide for setting up your Mac or Linux machine and your NXT Mindstorms brick for development with NXC. We will use the enhanced NXC firmware in order to enable extended functions for development.
1. Download the compiler
Download the latest NXC compiler from the NXC website. Pick the latest possible version if the very latest one is not yet available for your system. The download should contain a single file 'nbc'. Put the file somewhere on your disk, for example to /Developer/SDKs/nxt.2. Download the NeXT Tools
The NeXT tools are necessary for downloading firmware onto the brick and are useful for managing files on the brick, as well for program testing.3. Download the latest firmware
In order to use advanced NXC functions and some math functions, the enhanced firmware needs to be downloaded onto the intelligent brick. According to Ford Perfect's blog, the latest version can always be downloaded from here. Unzip the file and start up the NeXT tools.Reinstalling the firmware will erase all your files on the brick so it is a good idea to use the NeXT Explorer and upload all the files to your computer first.
When you are ready, press the Download firmware button and find your firmware file. NXT will restart after the firmware download is finished.
There will be no sounds that you are normally used to but don't panic! Just use the NeXT Explorer and download the backed-up sounds like Startup.rso and Click.rso back into the brick.You can always revert to the original firmware by getting it from the official Lego support page.
You are now ready to write and compile your first program!



Comments
[18/10/2018]
[17/10/2018]
[29/07/2015]
[29/07/2015]
[29/07/2015]
{Please enable JavaScript in order to post comments}