







[The Hive Mind in Southampton]
Added on 16/03/2015

I had the privilege to present The Hive Mind, my new sci-fi puzzle game about insect-inspired construction with robots, at the University of Southampton Science and Engineering day last weekend. A lot of people came to play it and it was great to watch how they interacted with it - kids were often better at the game than their parents!
Termites, ants, wasps and other social insects build their nests to be often 100s or even 1000s of times larger than a single individual. The insects have no overall plan, they have no idea what other particular individuals are doing and in case of termites and some ant species, they are blind and never fully know what they created. Instead, they use stigmergy, a principle where a change in the environment, for example the presence of a built wall, encourages and shapes future actions of individuals around. The insects use simple rules that tell them what to build when they sense a certain structure around them, or, in case of termites, when they sense certain amounts of a chemical substances, called pheromones, around.
 One day, we could use the same principles of decentralised construction in a swarm of builder robots. Why bother? If we sent only a single robot to a remote location, for example to another planet, and the robot broke down, the whole mission would fail. But instead, we could send simple robots with insect-like behaviour to cooperate and build together, making the whole team more robust to failures of single individuals. However, designing the control algorithms for such robot systems is complicated and we don’t fully understand how to do it reliably yet.
One day, we could use the same principles of decentralised construction in a swarm of builder robots. Why bother? If we sent only a single robot to a remote location, for example to another planet, and the robot broke down, the whole mission would fail. But instead, we could send simple robots with insect-like behaviour to cooperate and build together, making the whole team more robust to failures of single individuals. However, designing the control algorithms for such robot systems is complicated and we don’t fully understand how to do it reliably yet.
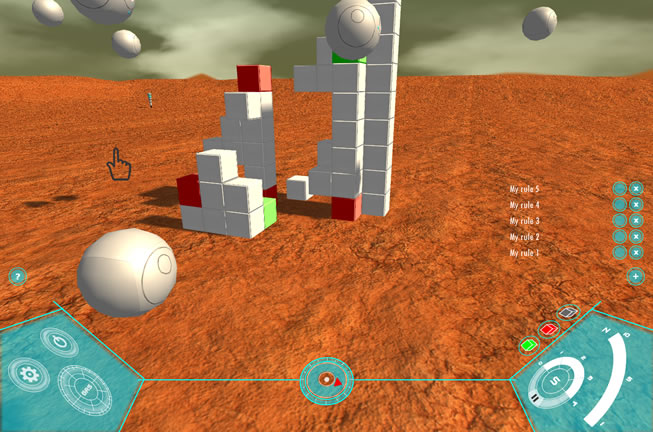
In The Hive Mind game, the player takes on the role of a Construction Coordinator who was sent to an alien planet and designs the rules for builder robots. The game offers various challenges, where a certain structure needs to be built by the robots. The higher the challenge level, the more decentralised and complicated the rules need to be. Everyone on the Science and Engineering day started with a training tutorial that teaches the basic principles of how to play. The adults were usually interested in the science behind the game and it was great to see their fascination as we explained how insect construction works. The kids of course did not care about the science and just wanted to build - some creations in the sandbox game mode were really nice!
 The event lasted for 6 hours and there were so many people to talk to. Luckily, I had help from my supervisor, Prof. Seth Bullock, who also cooperated on game development, and Nick Hill, another PhD student who does research into termite construction. Seth and me now have a lot of ideas on how to improve the game and where to take it next. I think playing it is great not only for training your logic, but also for understanding the new paradigm in programming and engineering - decentralisation. As the systems we design are becoming more and more complicated, we need new ways of thinking about how the components that make them should interact with each other with minimal human intervention. The evolution has shaped many species to solve the problem of decentralised control and we can learn a lot by studying the nature.
The event lasted for 6 hours and there were so many people to talk to. Luckily, I had help from my supervisor, Prof. Seth Bullock, who also cooperated on game development, and Nick Hill, another PhD student who does research into termite construction. Seth and me now have a lot of ideas on how to improve the game and where to take it next. I think playing it is great not only for training your logic, but also for understanding the new paradigm in programming and engineering - decentralisation. As the systems we design are becoming more and more complicated, we need new ways of thinking about how the components that make them should interact with each other with minimal human intervention. The evolution has shaped many species to solve the problem of decentralised control and we can learn a lot by studying the nature.
I hope that one day we can really use robotic swarms on remote planets, under water or even in our bodies to create and repair structures or to gather minerals, water and other things necessary for human survival. NASA is already taking steps towards making it happen. I am contributing in my own small way by looking at how we can learn principles of decentralised control from insects and apply them on robots. And in The Hive Mind, you can contribute too by finding new ways for robots to build interesting things.
You can read even more about The Hive Mind and the event in the EPSRC CDT blog by Hans Fangohr.



{Please enable JavaScript in order to post comments}