







[Information Flow Principles in Robot Swarms]
Project: Designing Robot Swarms
Date: Oct 2015
Publication: Pitonakova, L., Crowder, R. & Bullock, S. (2016). Information flow principles for plasticity in foraging robot swarms. Swarm Intelligence, 10(1), 33–63.

 An important characteristic of a robot swarm operating in the real world is the ability to cope with changeable environments by exhibiting behavioral plasticity at the collective level. The word "plasticity" refers to the ability of a collective to respond to changes in the environment, without any help from humans.
An important characteristic of a robot swarm operating in the real world is the ability to cope with changeable environments by exhibiting behavioral plasticity at the collective level. The word "plasticity" refers to the ability of a collective to respond to changes in the environment, without any help from humans.
For example, in the setting explored in our paper, we investigate how different robot algorithms work in environments where utility of resource deposits changes over time. An ideal system would always collect resources from a deposit with the highest utility. However, because robots need to cope with various problems and interferences, different algorithms achieve different performance.
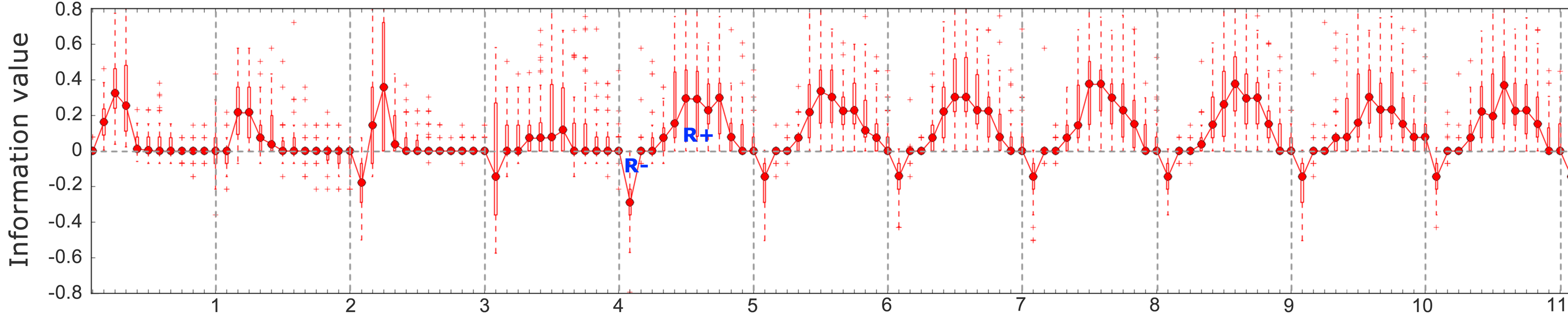
Analyzing swarm behaviour in terms of information value, a novel measure defined in our paper, can help us identify whether a particular robot control algorithm is likely to lead to plasticity of a swarm as a whole in dynamic environments.
It is shown that fast information flow is beneficial in static environments. Plastic swarm behaviour, important in dynamic or unknown environments, requires regulated information flow that leads to a greater balance between exploitation and exploration.

Date: Oct 2015
Publication: Pitonakova, L., Crowder, R. & Bullock, S. (2016). Information flow principles for plasticity in foraging robot swarms. Swarm Intelligence, 10(1), 33–63.
For example, in the setting explored in our paper, we investigate how different robot algorithms work in environments where utility of resource deposits changes over time. An ideal system would always collect resources from a deposit with the highest utility. However, because robots need to cope with various problems and interferences, different algorithms achieve different performance.
Analyzing swarm behaviour in terms of information value, a novel measure defined in our paper, can help us identify whether a particular robot control algorithm is likely to lead to plasticity of a swarm as a whole in dynamic environments.
It is shown that fast information flow is beneficial in static environments. Plastic swarm behaviour, important in dynamic or unknown environments, requires regulated information flow that leads to a greater balance between exploitation and exploration.



{Please enable JavaScript in order to post comments}