







[Robustness of Foraging E-puck Swarms]
Project: Designing Robot Swarms
Date: Aug 2018


 Publication:
Pitonakova, L., Winfield, A. F. T. & Crowder, R. (2018). Recruitment near worksites facilitates the robustness of foraging e-puck swarms to global positioning noise. Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), IEEE, 4276-4281.
Publication:
Pitonakova, L., Winfield, A. F. T. & Crowder, R. (2018). Recruitment near worksites facilitates the robustness of foraging e-puck swarms to global positioning noise. Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), IEEE, 4276-4281.
We compare the ability of two different robot controllers for collective foraging to cope with noise in robot global positioning data and show how recruitment, in the form of broadcast messages near worksites, can make swarms more robust. Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON positioning system. This setup allows us to control the amount of noise in the robot positioning data, as well as to generate pseudo-random environments. The effect of inherent noise in the robot infra-red sensors, used for obstacle avoidance, is also noted and the importance of modeling such noise in agent-based simulations is highlighted.
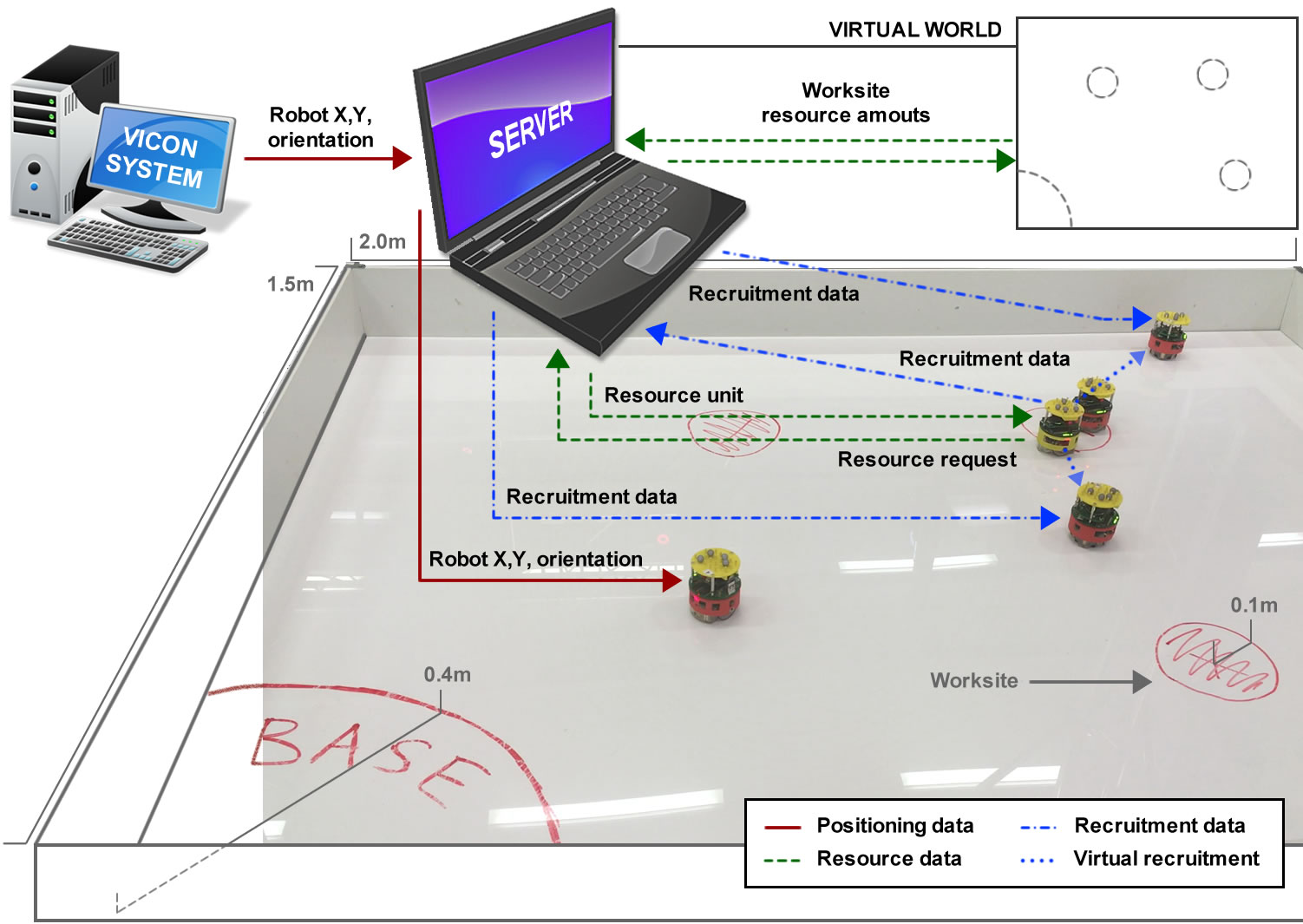 The experimental setup consisting of the e-puck arena, a Server and a VICON system. Worksites are drawn on the arena floor for visualisation purposes only. The robots communicated with the Server in order to obtain positional, worksite and recruitment data. The Server maintained a virtual representation of the world, keeping track of base, worksite and robot locations and the amount of resource units in each worksite.
The experimental setup consisting of the e-puck arena, a Server and a VICON system. Worksites are drawn on the arena floor for visualisation purposes only. The robots communicated with the Server in order to obtain positional, worksite and recruitment data. The Server maintained a virtual representation of the world, keeping track of base, worksite and robot locations and the amount of resource units in each worksite.
Results summary



Date: Aug 2018
We compare the ability of two different robot controllers for collective foraging to cope with noise in robot global positioning data and show how recruitment, in the form of broadcast messages near worksites, can make swarms more robust. Swarms of five e-puck robots are used in a semi-virtual environment, facilitated by the VICON positioning system. This setup allows us to control the amount of noise in the robot positioning data, as well as to generate pseudo-random environments. The effect of inherent noise in the robot infra-red sensors, used for obstacle avoidance, is also noted and the importance of modeling such noise in agent-based simulations is highlighted.
The experimental setup consisting of the e-puck arena, a Server and a VICON system. Worksites are drawn on the arena floor for visualisation purposes only. The robots communicated with the Server in order to obtain positional, worksite and recruitment data. The Server maintained a virtual representation of the world, keeping track of base, worksite and robot locations and the amount of resource units in each worksite.Results summary
Basic foraging loop
Congestion formation



{Please enable JavaScript in order to post comments}