







[NXC UserInteraction Library]
Date: Mar 2012
Current version: 1.2 :: Follow me on Twitter for updates
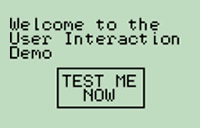
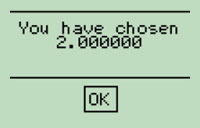
The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned texts, buttons, menus, etc.) and capture user actions on the NXT Mindstorms brick.
The library works with the intelligent brick buttons and keeps all your sensor ports free for your program to use.
The UIn Library is a single .h file that can be included with your NXC project. It has been tested with NBC version 1.2.1 r4 and requires the NXC extended firmware. Please read the development setup tutorial if you are not sure how to get extended firmware.
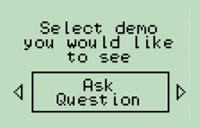
This is an example of using a sliding menu in order to decide which task to exectute. UIn function createSlidingMenu() is called with appropriate arguments and the program waits until user selects an option from the menu. The user choice is then resolved by the calling task. Note that ExitTo(Task newTask) is used in order to close the current task and start a new one. This prevents unpredictable behaviour of the new task when calling UIn and other functions.
Please comment or email me if you have questions or ideas about new functionality.
Current version: 1.2 :: Follow me on Twitter for updates
The User Interaction (UIn) Library helps you create standard user interfaces (multi-line aligned texts, buttons, menus, etc.) and capture user actions on the NXT Mindstorms brick.
The library works with the intelligent brick buttons and keeps all your sensor ports free for your program to use.
The UIn Library is a single .h file that can be included with your NXC project. It has been tested with NBC version 1.2.1 r4 and requires the NXC extended firmware. Please read the development setup tutorial if you are not sure how to get extended firmware.
Main features

How it works
Download a demo (XCode) project to try out the whole UserInteraction library.This is an example of using a sliding menu in order to decide which task to exectute. UIn function createSlidingMenu() is called with appropriate arguments and the program waits until user selects an option from the menu. The user choice is then resolved by the calling task. Note that ExitTo(Task newTask) is used in order to close the current task and start a new one. This prevents unpredictable behaviour of the new task when calling UIn and other functions.
#include "UserInteraction.h"
task main() {
//-- create menu with 2-line option items
string menuItems[3] = {"First#Option","Second#Option", "Third#Option"};
int userResponse = createSlidingMenu("Select#an option",menuItems, 0);
//-- resolve answer from the sliding menu
switch (userResponse) {
case 0:
// Selected 'First Option'
ExitTo(onFirstOption);
break;
case 1:
// Selected 'Second Option'
ExitTo(onSecondOption);
break;
default:
// Selected 'Third Option'
ExitTo(onThirdOption);
break;
}
}
task onFirstOption() {}
task onSecondOption() {}
task onThirdOption() {}
}
Other features
Text drawing functions
- LocationType drawAlignedText (string text_, int yPosition_, UIN_ALIGNMENT alignment_, int maxWidth_ = -1)
- LocationType drawCenteredBorderedTextWithMinWidth (string text_, int yPosition_, int minWidth_)
- LocationType drawCenteredBorderedText (string text_, int yPosition_)
Shape-drawing functions
- LocationType drawBorderAroundText (LocationType textInfo_, int yPosition_)
- void drawArrow (UIN_DIRECTION arrowDirection_, int xPosition_, int yPosition_)
Helper functions
- int getTextPixelLength (string text_)
- int getAlignedTextPosition (string text_, UIN_ALIGNMENT alignment_)
- int normaliseTextXPosition (string text_, int xPosition_)
- int lastPos(string substr_, string string_)
Math functions
- int round (float number_)
- float abs (float number_)
Other
Please comment or email me if you have questions or ideas about new functionality.



Comments
[26/03/2013]
[26/03/2013]
[26/03/2013]
{Please enable JavaScript in order to post comments}