







[Task Allocation in Foraging Robot Swarms]
Project: Designing Robot Swarms
Date: Apr 2016


 Publication:
Publication:
Pitonakova, L., Crowder R. & Bullock, S. (2016). Task allocation in foraging robot swarms: The role of information sharing. In Gershenson, C. et al. (eds.), Proceedings of the Fifteenth International Conference on the Synthesis and Simulation of Living Systems (ALIFE XV), MIT Press, 306-313.
Autonomous task allocation is a desirable feature of robot swarms that collect and deliver items. When there are many robots in the swarm, or when collected items accumulate quickly in a drop-off location, congestion can prevent the swarm from working effectively. In such scenarios, self-regulation of workforce can prevent unnecessary energy consumption.
In this paper, we analyse bee-inspired self-regulation algorithms for robot swarms that deliver items into a single drop-off location.
We explore two types of self-regulation:

Outcome:
We show that both types of self-regulation can lead to improved energy efficiency and increase the amount of resource collected. More importantly, the rate at which information about congestion spreads through a swarm affects the scalability of the explored robot control strategies.
A slow information flow, characteristic for non-social self-regulation, leads to behaviour suitable for a larger number of experimental scenarios. On the other hand, fast information flow, achieved by social self-regulation, causes more extreme difference in performance across scenarios. Using swarms with faster information flow thus requires us to be more certain about the environmental conditions we employ our swarms in.

Date: Apr 2016
Pitonakova, L., Crowder R. & Bullock, S. (2016). Task allocation in foraging robot swarms: The role of information sharing. In Gershenson, C. et al. (eds.), Proceedings of the Fifteenth International Conference on the Synthesis and Simulation of Living Systems (ALIFE XV), MIT Press, 306-313.
Autonomous task allocation is a desirable feature of robot swarms that collect and deliver items. When there are many robots in the swarm, or when collected items accumulate quickly in a drop-off location, congestion can prevent the swarm from working effectively. In such scenarios, self-regulation of workforce can prevent unnecessary energy consumption.
In this paper, we analyse bee-inspired self-regulation algorithms for robot swarms that deliver items into a single drop-off location.
We explore two types of self-regulation:
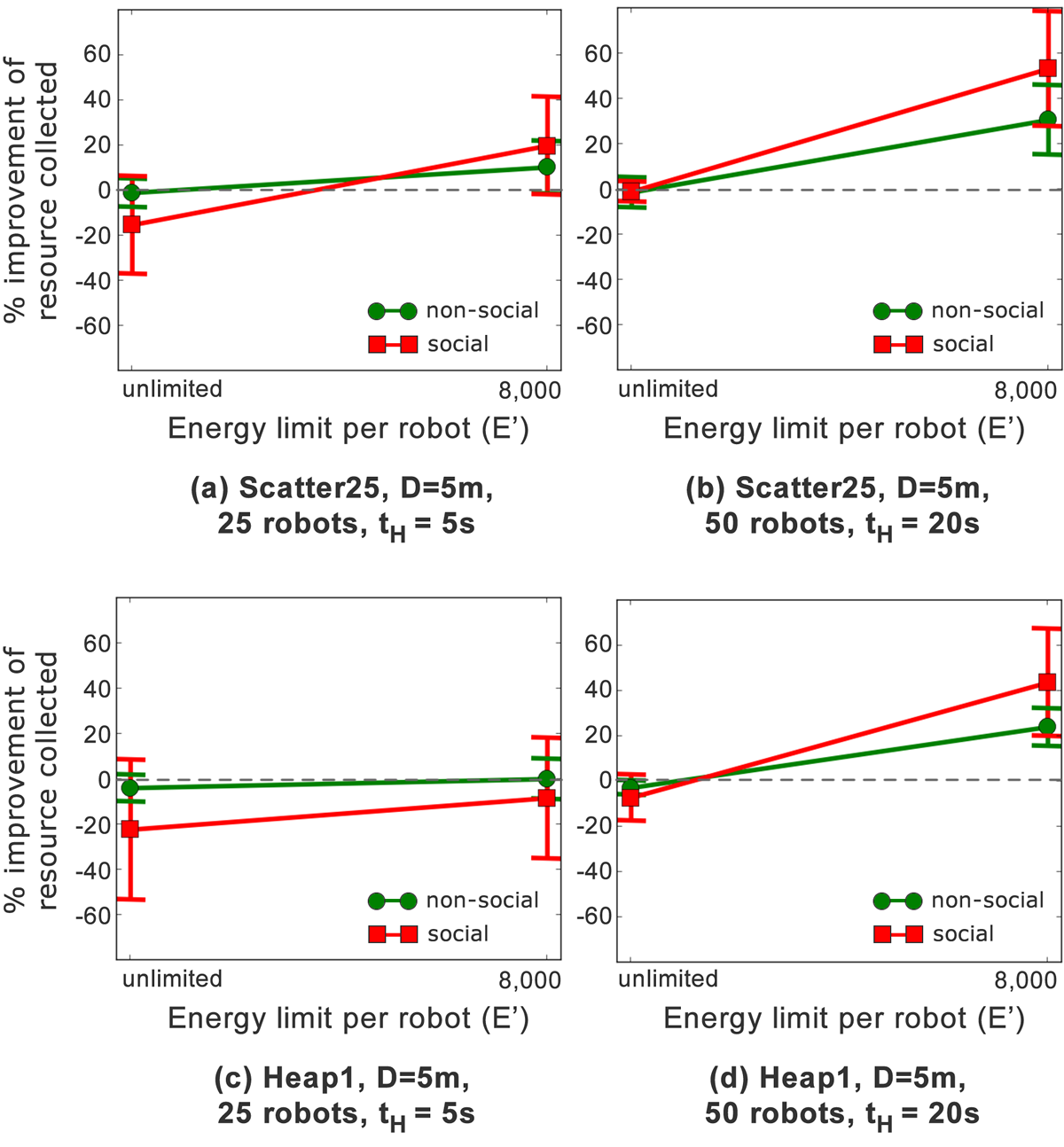
- Non-social, where robots go to rest when they experience congestion
- Social, where robots broadcast information about congestion to their team mates to tell them that they should rest
Outcome:
We show that both types of self-regulation can lead to improved energy efficiency and increase the amount of resource collected. More importantly, the rate at which information about congestion spreads through a swarm affects the scalability of the explored robot control strategies.
A slow information flow, characteristic for non-social self-regulation, leads to behaviour suitable for a larger number of experimental scenarios. On the other hand, fast information flow, achieved by social self-regulation, causes more extreme difference in performance across scenarios. Using swarms with faster information flow thus requires us to be more certain about the environmental conditions we employ our swarms in.



{Please enable JavaScript in order to post comments}